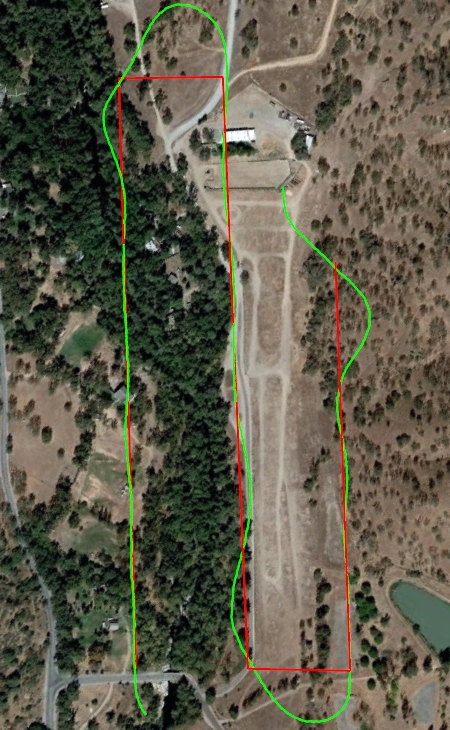
TEST2: A waypoint path 1.10 miles in total distance was created and loaded to the UAV. Several flights were made and the UAV's tracking was analyzed after each flight from the
ground and through post processing of onboard log files. Log files are updated at 5x a second for all fields including
lat, lon, altitude, pitch, roll , speed and many others. After review of each flight's log files adjustments to UAV's
gain settings and various rates were applied. Below are 4 consecutive attempts at the same waypoint with each attempt improvement
can be seen in the actual (GREEN) path vs the intended (RED) path. On the last attempt the UAVs altitude range was about 12 feet,
pitch and roll oscillation were about +- 0.80 degree and speed range was 5 MPH
RED: Intended path...GREEN: Actual path....TOTAL WP DISTANCE: 1.10 Mi